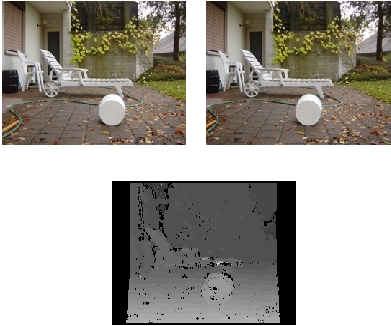
Obere Reihe: Zwei Blickpunkte derselben Szene. Die Kameraverschiebung beträgt 10cm.
Unten: Die daraus berechnete depth map zeigt helles Grau für nahe Regionen und dunkles Grau für entfernte Bereiche.
Da die Raumtiefenberechnung aus Stereobildern ein sehr rechenaufwändiger Vorgang ist, kam die Idee auf, einen Chip herzustellen, welcher diese Aufgabe dank Parallelität in Echtzeit löst. Auf diese Weise lässt sich das Verfahren z.B. im Strassenverkehr verwenden für Hinderniserkennung oder kann im Bereich der mobilen Robotik gute Dienste leisten.
Der Chip
Der ASIC verarbeitet Bilder der Grösse 256*192 mit 256 Graustufen.
Er kann mit gut 70 MHz betrieben werden und erreicht dabei über 50
Bilder in der Sekunde (fps). Dies entspricht etwa einer Rechenleistung
von 18 GOps. Die eigentliche Grösse des Silikons ist 2.56mm^2 auf
einem UMC 0.25um 5Metall-Prozess.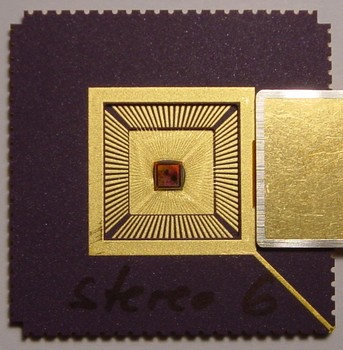
Links: Das offene Chip-Gehäuse mit den Golddrähten zur Verbindung der Anschlüsse nach aussen.
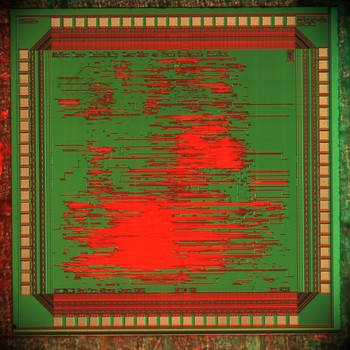
Rechts: Eine Mikroskop-Aufnahme des Silikon-Wavers.
last update: 22.2.04 Stephan Moser